Cheaper Alternative to LiDAR Based 3D Interior Mapping and Annotation
Bergen County Academies
Abstract
As camera and sensor aided technology has been utilized increasingly by civil engineers and architects, affordable 2d LiDAR (Light Detection and Ranging) systems have also become accessible to consumers and hobbyists to use for a variety of purposes from surveying to SLAM (Simultaneous Localization and Mapping) applications in robotics. However, there is yet to be affordable (<$500) 3d LiDAR scanners on the consumer market. Therefore, by using a readily available and cheap 2d LiDAR scanner and rotating it on a horizontal axis, a relatively accurate 3d LiDAR system can be constructed at reasonable cost.
Our project consists of rotating a RPLIDAR A1 scanner with a hobbyist servo controlled through an arduino that can collect real time 3d point cloud data. In addition, by combining this data with IMU (inertial measurement unit) sensors which can measure linear and rotational acceleration to determine location, the LiDAR can be moved through space and form a point cloud of entire rooms for further use. Additionally, our semantic segmentation algorithm can parse through point cloud data and detect objects which has many useful applications in 3d modelling and robotics.
The project can thus provide a low cost option for an automatic comprehensive 3d view and measurements of an indoor space to be used by engineers and architects to gauge the environment and approach solutions. Furthermore, the ability to have a relatively cheap and small 3d LiDAR scanner is highly useful for robotics applications such as mapping and localization. This project can open opportunities to hobbyist engineers as well as small scale teams with limited budget the access to 3d LiDAR technology.
The device will be tested in hallways and rooms by measuring the location of objects and walls in a room and then comparing this data with information that the LiDAR records and calculates. The detection of objects in the scan will be measured for accuracy by comparing the detected objects and their locations with the actual objects.
Rationale
3D LiDAR surveying is an important tool used in architecture, robotics, and engineering. However, apt 3D lidar scanning systems are very expensive (costing thousands of dollars per space) and usually require professional operation. These factors make LiDAR technology inaccessible to small teams and hobbyists. This project aims to develop a cost-effective alternative to traditional indoor LiDAR surveying.
Research Question
How can an inexpensive 2D LiDAR scanner when combined with a rotating mechanism and IMU sensors, be used to create a cost-effective 3D surveying system in indoor environments?
List of Materials
Hardware
Software
- Arduino IDE
- ROS 2
- OneFormer 3D Segmentation Model
Procedures
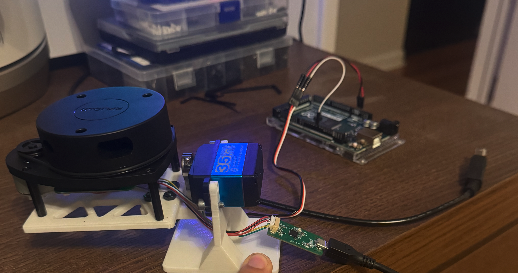
We secure our RPLIDAR sensor and attach a servo motor onto a stable base that allows the LiDar to rotate about a vertical axis. We mount the IMU sensor onto the LiDAR sensor to track rotation and lidar points. We connect the servo and the IMU to an Arduino and the Lidar to a computer. We write an Arduino script to control the motor and read data from the IMU sensor. All of the electronics are controlled by LiPo batteries for on the go data collection. There is a robot that drives unintelligently throughout a room while the LiDAR collects points from various locations.
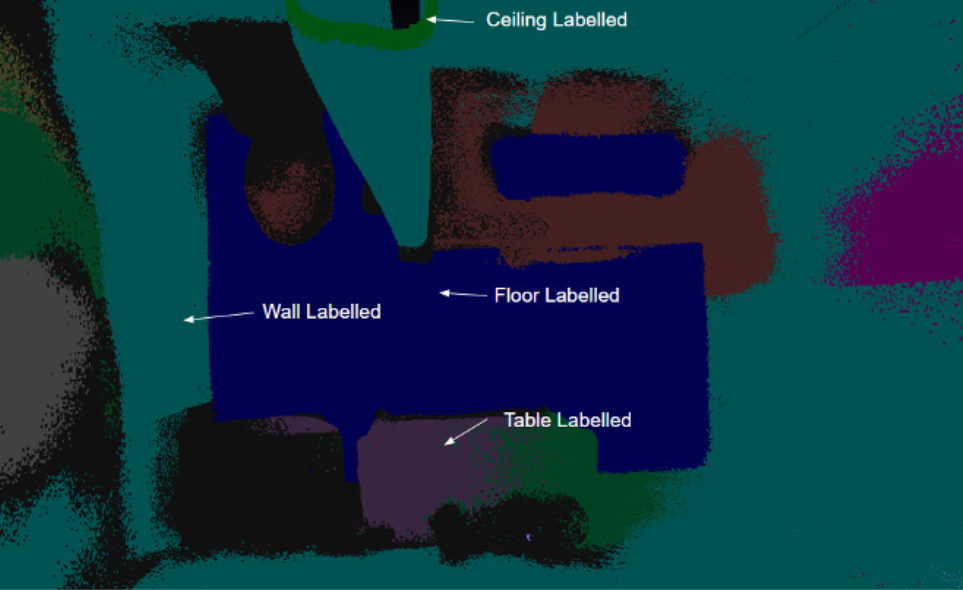
We write a program to process the point data from the LIDAR into a CSV file for segmentation processing. We have an intermediate Python script that uses rotation matrices to give a visual representation of the unprocessed data. We create a GUI (Graphic User Interface) in Python to monitor sensor status, movement, and graph incoming data from the LIDAR. We implement the OneFormer3D Panoptic Segmentation algorithm to detect objects and miscellaneous points in the data received. We run the segmentation algorithm on point cloud datasets collected by peers to test the accuracy. We write a program to plot these objects and generate 3D visuals, measurements and diagrams, inside of the GUI. We test the system in hallways and rooms of residential buildings and compare the 3D models with actual measurements of the room and objects that exist in the room. We hope for millimeter precision in the scan data.
Risk and Safety
The actual sensors pose no risk as the light range that the lidar uses is in a safe range for the eyes. The battery is powered by LiPo batteries and these can pose some threat of sparks and fire but we ensure safety by using a 25 amp fuse to protect if the current is too high. Some of the robot functions at 12V and other parts at 5V and at the low amperage we operate at this poses next to no risk however all wires are shielded to prevent any touching of live wires.
There are no hazardous chemicals or microorganisms used in this project. Devices used include a soldering iron, a heat gun, and an electric drill. For the heat elements, proper PPE are used including goggles, pants, and proper ventilation hoods as provided by MRL. A clean work area is maintained at all times to ensure no accidents happen. When using a drill, goggles are used and a clean work area is maintained.
Bibliography
"Combining Camera and Lidar - DiffBot Differential Drive Mobile Robot." Ros-Mobile-Robots.com, 2020, ros-mobile-robots.com/theory/robot-vision/combining-camera-and-lidar/. Accessed 3 Feb. 2025.
Kolodiazhnyi, M., Vorontsova, A., Konushin, A., & Rukhovich, D. (2023, November). OneFormer3D: One Transformer for Unified Point Cloud Segmentation. Retrieved from https://arxiv.org/abs/2311.14405.
Rohan Panicker. Sensor fusion between IMU and 2D LiDAR Odometry based on NDT-ICP algorithm for Real-Time Indoor 3D Mapping. TechRxiv. July 25, 2023.
Weisstein, Eric W. "Rodrigues' Rotation Formula." Mathworld.wolfram.com, mathworld.wolfram.com/RodriguesRotationFormula.html.
Zeng, Y., Yu, H., Dai, H., Song, S., Lin, M., Sun, B., Jiang, W., & Meng, M. Q.-H. (2018). An Improved Calibration Method for a Rotating 2D LIDAR System. Sensors, 18(2), 497. https://doi.org/10.3390/s18020497
Project Gallery